
Hình nền học tập đáng yêu và thú vị
Khám phá ngay những hình nền học tập đẹp và dễ thương trong bài viết này!

Chủ đề học tập luôn là nguồn cảm hứng không ngừng, đặc biệt là với những bạn đang ở độ tuổi học tập. Hãy tận hưởng không gian học tập với những hình ảnh mới lạ cho điện thoại hay máy tính của bạn.
Các giáo viên cũng có nhu cầu tìm kiếm hình ảnh động để sử dụng trong giảng dạy. Hãy cùng khám phá và chia sẻ sự sáng tạo qua những hình nền này!
Nếu bạn đam mê học tập, sách vở, hãy đón những bức ảnh học tập dễ thương này.
Khám phá bộ sưu tập hình nền học tập đẹp và dễ thương dành riêng cho bạn.

Trải nghiệm đẳng cấp với hình nền học tập độ phân giải 4k.

Thả mình vào không gian học tập qua góc nhìn độc đáo với hình nền này.
Khám phá vẻ đẹp tinh tế của hình nền học tập đẹp nhất.

Thả mình vào không gian học tập qua hình nền học tập đẹp.
Dành chút thời gian thư giãn với hình nền học tập đẹp.
Trải nghiệm không gian học tập qua hình nền máy tính độc đáo.

Khám phá không gian học tập tuyệt vời
Bức tranh chủ đề về sự học tập
Hình nền đẹp tận hưởng học tập

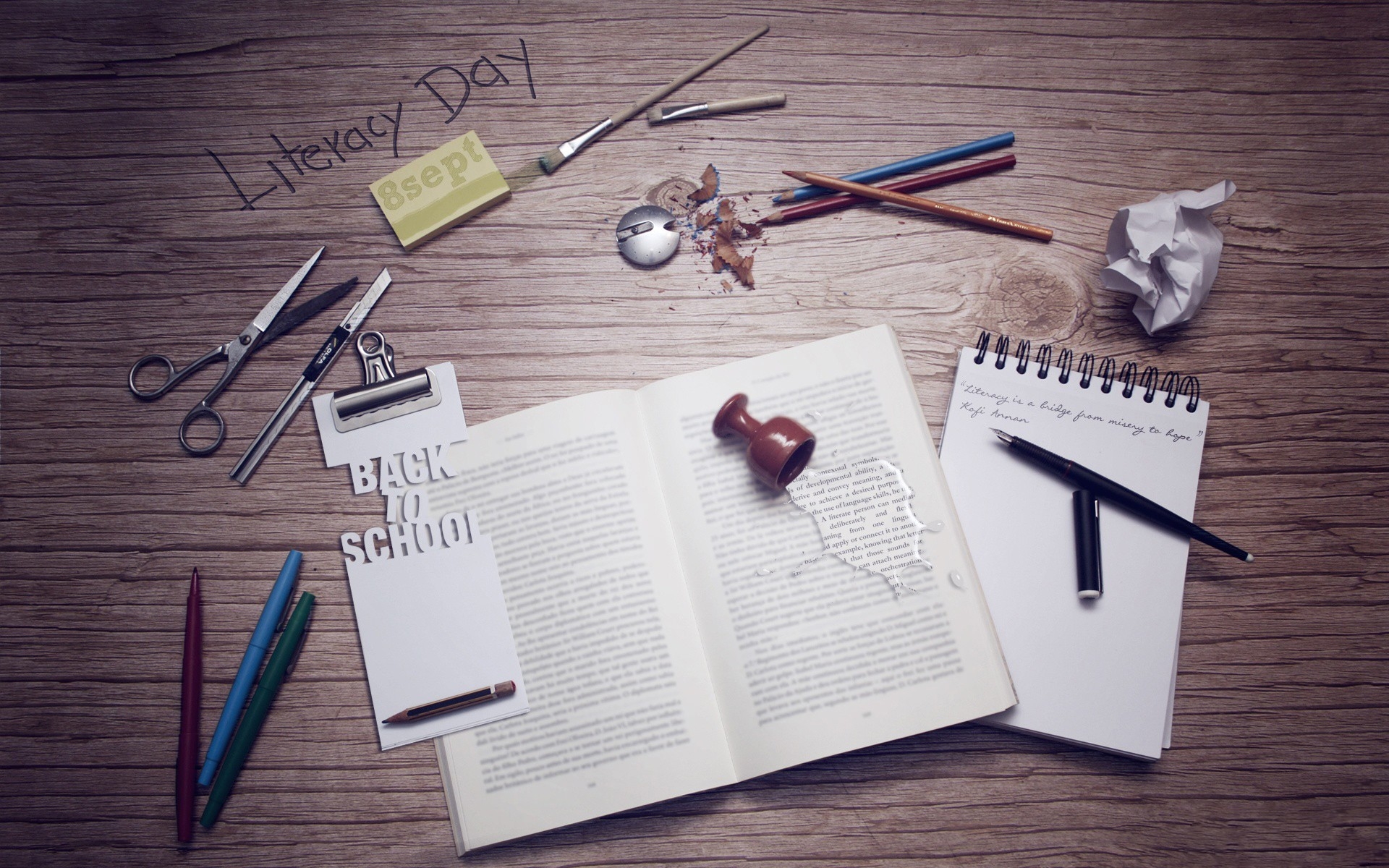
Khám phá không gian trở lại trường học

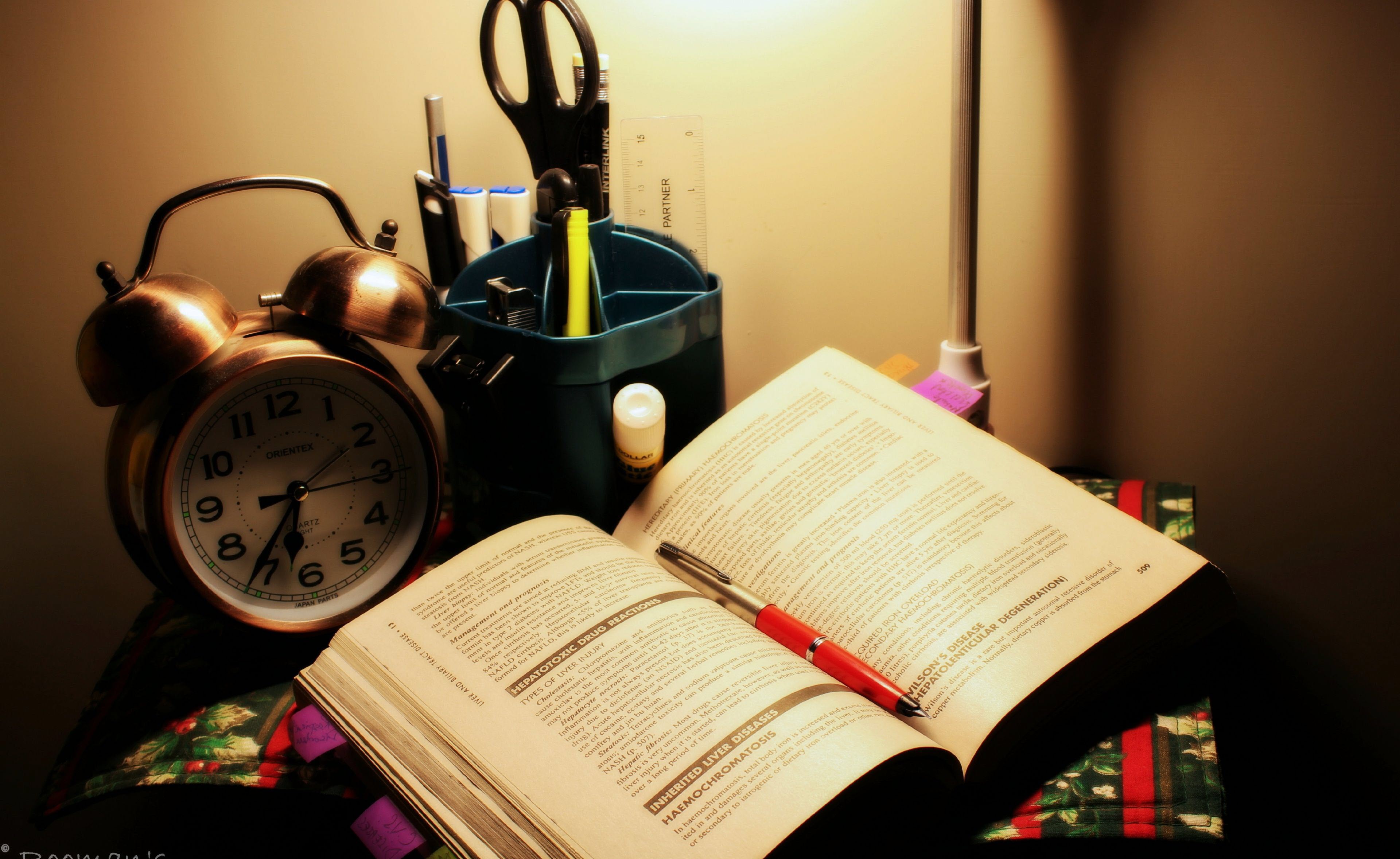
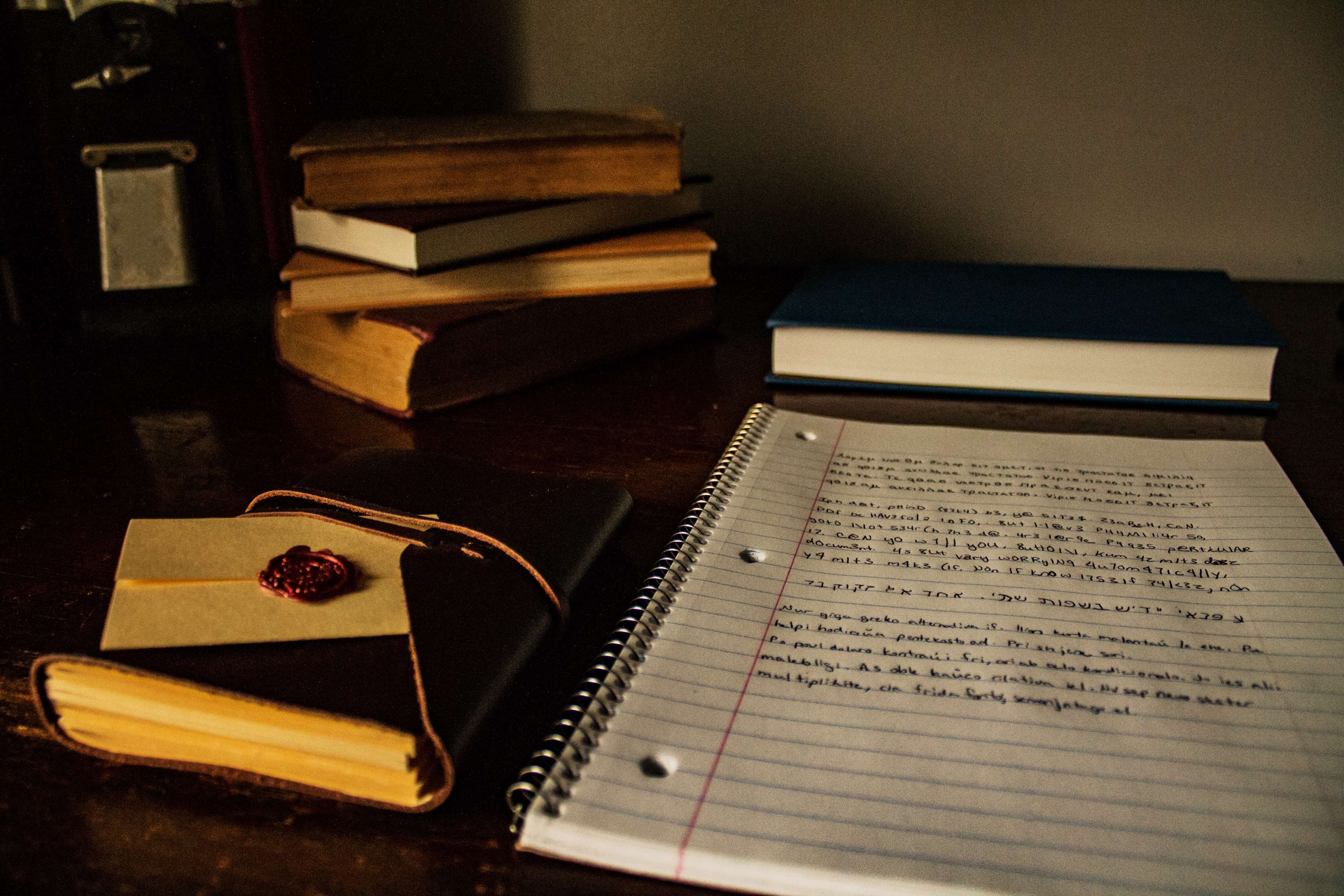
Khám phá không gian học tập tuyệt vời trên bàn làm việc

Bức tranh đẹp của không gian học tập cá nhân

Hình nền bảng học tập sáng tạo

Khám phá đồ dùng học tập qua bức tranh nền tuyệt vời
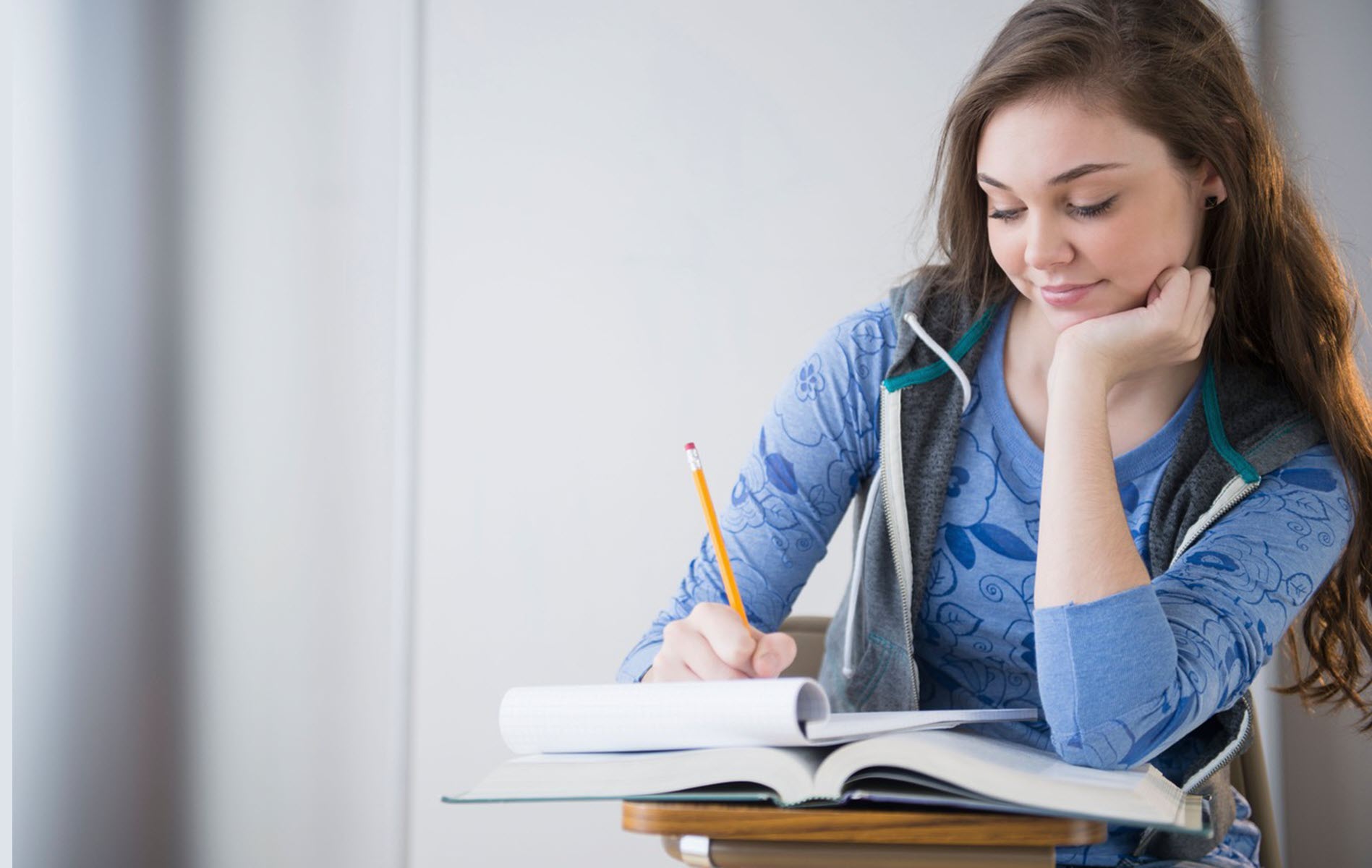
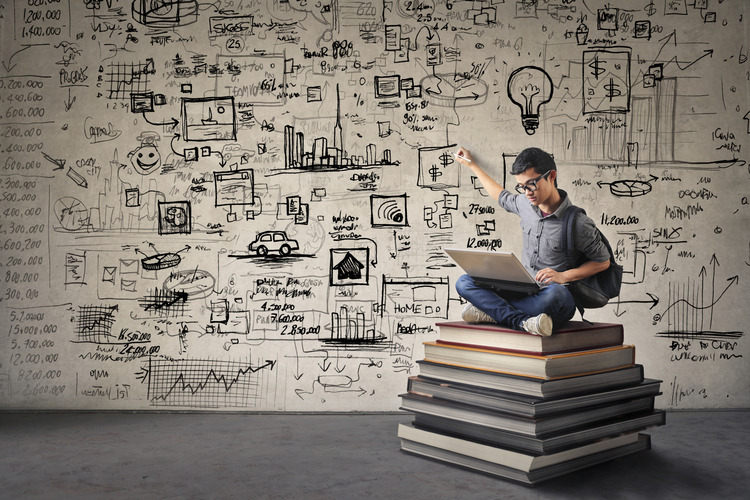
Bức tranh người con gái tận hưởng không gian học tập

Hình nền sự hăng say trong hành trình học tập

Khám phá không gian học tập qua chủ đề đẹp

Hình nền đẹp của sự chăm chỉ trong chủ đề học tập
Bức tranh đẹp về chủ đề học tập

Hình nền chất lượng cao về học tập cho máy tính 4k
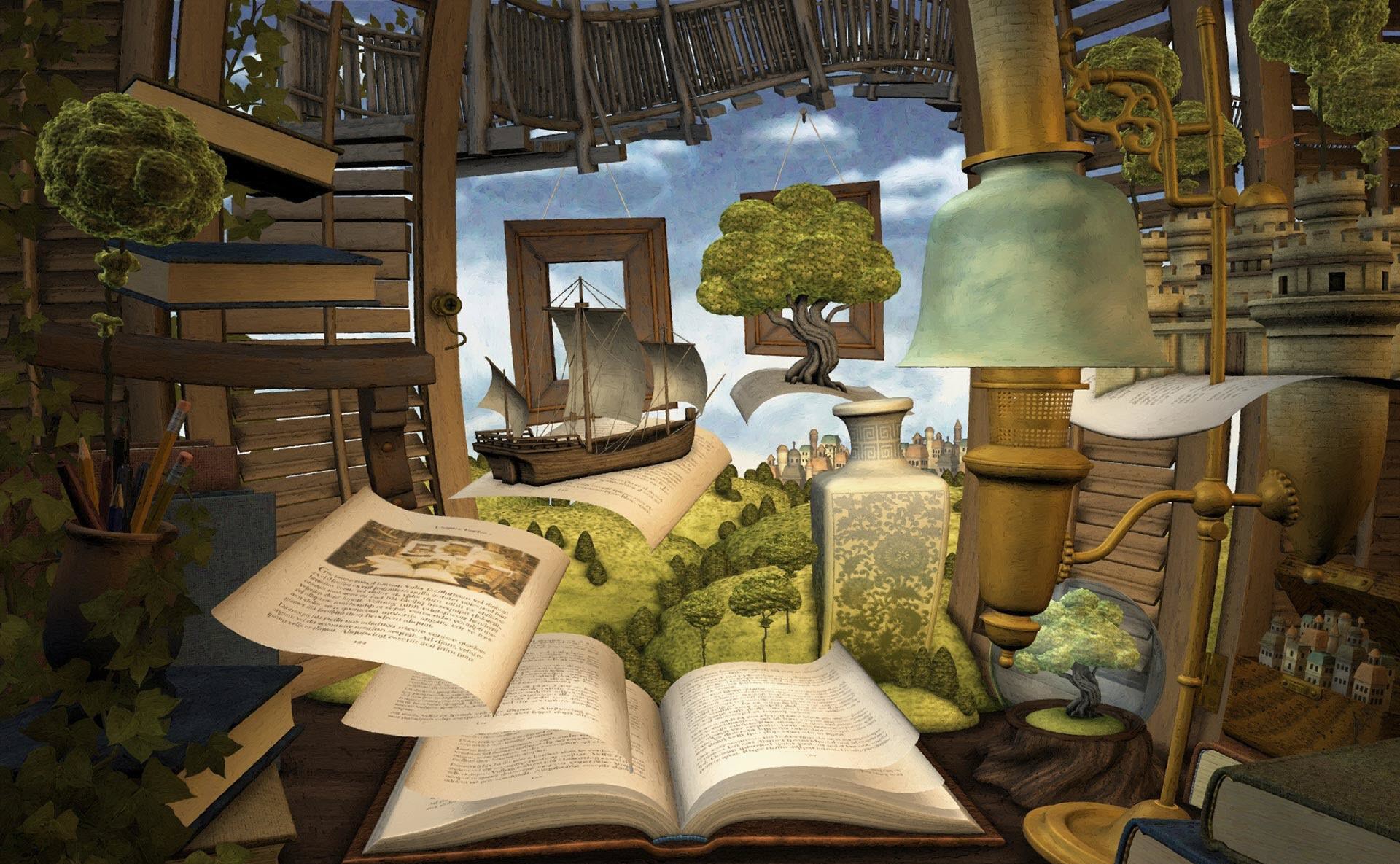
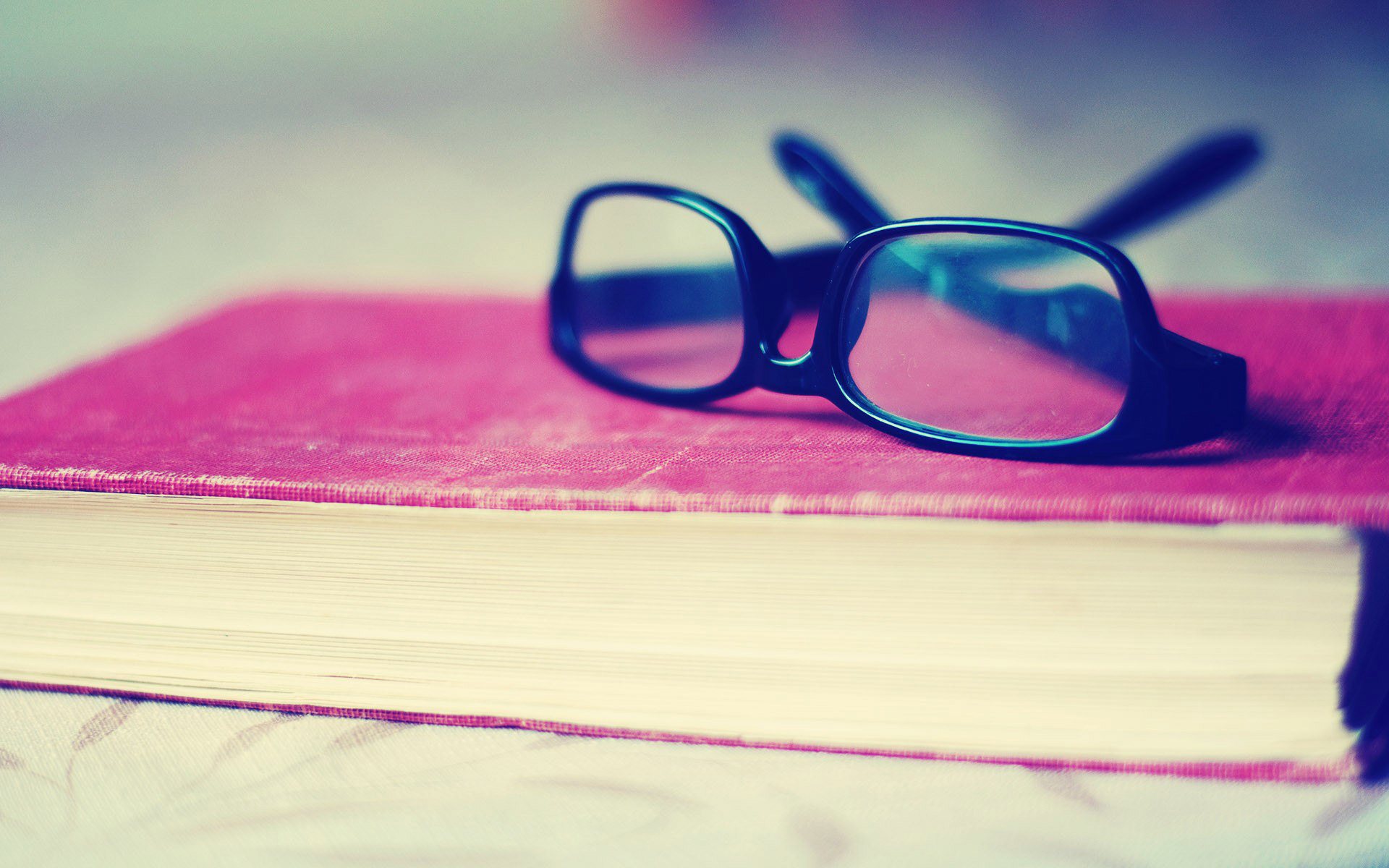
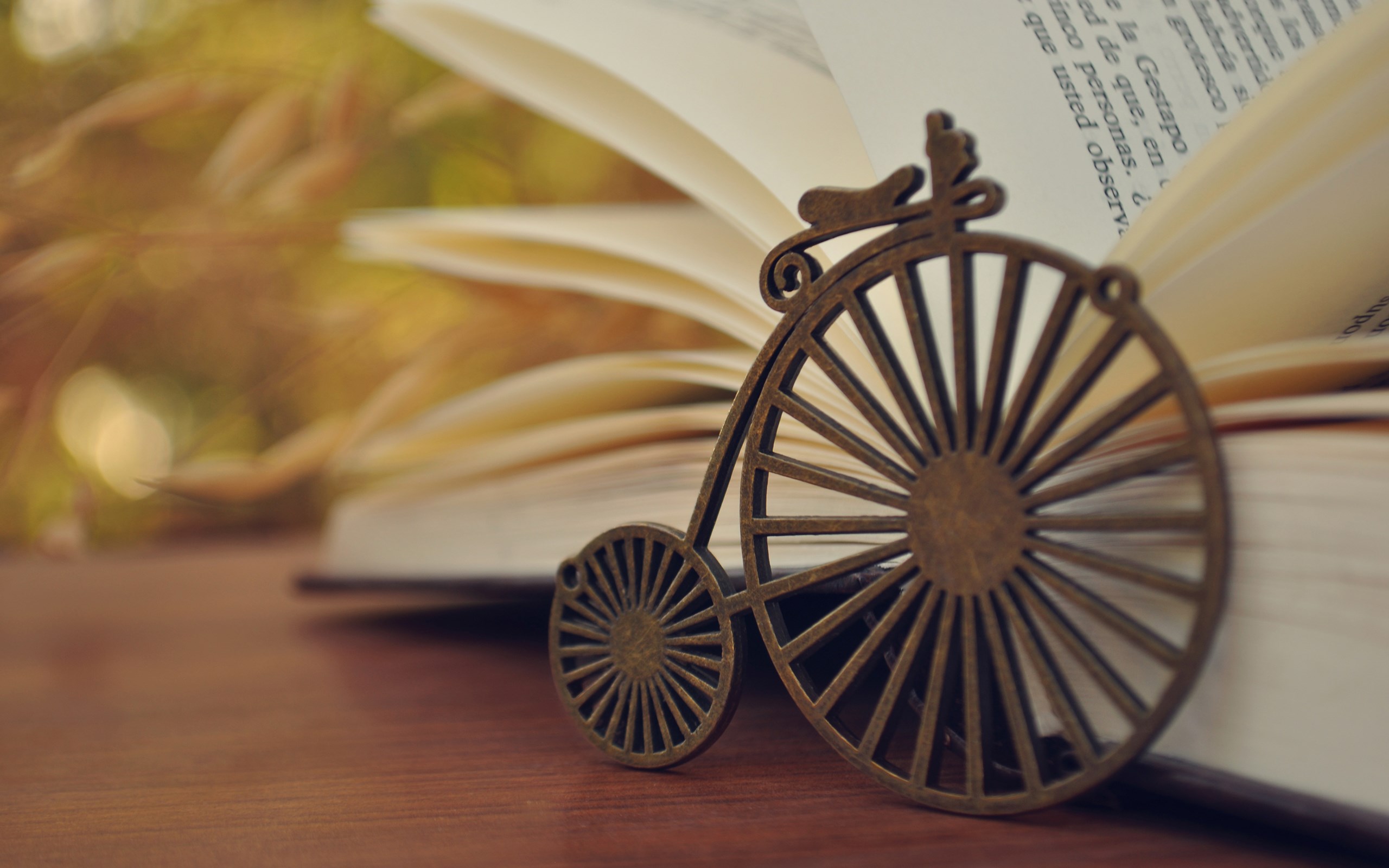
Khám phá không gian sách vở học tập qua hình nền đẹp
Bức tranh đẹp về thế giới sách vở

Bức tranh đẹp về học tập cho điện thoại

Hình nền điện thoại tinh tế với chủ đề sách vở
Hình nền chất lượng cao dành cho máy tính

Bức tranh đáng yêu về học tập cho điện thoại

Bức tranh đẹp về sự chăm chỉ trong học tập
Hình nền học tập tinh tế cho điện thoại
Khám phá không gian học tập qua hình nền máy tính

Bức tranh đáng yêu về học tập chất lượng cao 4k (Nhấp chuột để xem ảnh gốc)
Bức tranh đáng yêu về học tập chất lượng cao HD

Khám phá không gian dễ thương của sự học tập
Hình nền học tập đẹp với chất lượng cao 4k (Nhấp chuột để xem ảnh gốc)
Bức tranh đẹp và dễ thương về học tập
Khám phá không gian học tập tuyệt vời
Bức tranh đẹp về sự học tập
Hình nền toán học tinh tế về học tập

Khám phá không gian học tập độc đáo
Bức tranh đẹp về kệ sách

Hình nền máy tính 4k tuyệt vời về học tập

Khám phá không gian học tập qua hình nền số liệu đẹp
Bức tranh đẹp của những cuốn sách học tập

Hình nền PC siêu nét về học tập
Bức tranh đẹp về PowerPoint và hành trình học tập

Khám phá không gian học tập qua hình nền PowerPoint với sách vở

Bức tranh đẹp về sách bút
Bức tranh đẹp về thế giới sách
Hình nền sách vở chất lượng cao 4k

Bức tranh đẹp của sách vở và bảng phấn

Bức tranh đáng yêu về thế giới sách vở

Bức tranh đẹp về sách vở tuyệt nhất
Hình nền đẹp của thế giới sách vở

Khám phá không gian sách
Bức tranh đẹp về thế giới toán học
Chân thành cảm ơn bạn đã ghé thăm Mytour. Chúng tôi đã sưu tập và chia sẻ những bức tranh học tập độc đáo nhất để mang đến cho bạn trải nghiệm thú vị. Hy vọng bạn sẽ say mê những hình ảnh học tập tuyệt vời này. Xin chân thành cảm ơn sự quan tâm và theo dõi của bạn!
Link nội dung: https://myphamsakura.edu.vn/anh-hoc-tap-cham-chi-cute-a35437.html